
アプリケーション
サブアドレスの使用
規格では、サブアドレスの使用について一切ガイダンスを提供していません。サブアドレスの割当てとその機能(データ内容)は設計者に委ねられています。ほとんどの設計者は自動的に01でサブアドレスの割当てを始め、カウントを上げていきますが、 サブアドレスの最初のシリーズが16で始まり、カウントアップすることが推奨されます。サブアドレス割当ての「前半」の使用後、01~15を使用します。この方法でのサブアドレスを割当てると、インスツルメンテーション・ビットを使用することができます。
サブアドレス使用の一貫性は、何れのシステムでもプラスになります。例えば、サブアドレス30が予約された場合、システム全体がBuilt In Test(BIT)データ用で、サブアドレス20が予約された場合、 システム全体がラップアラウンド・メッセージ用で、これらのメッセージが監視システムにより記録された時はいつでも、その意味が明白になります。 データ・メッセージは、サブアドレスの類似分割により、整備、および制御メッセージと区分することができます。
規格はまた、通常のサブアドレスがブロードキャスト・サブアドレスと分離されることも要求しています。 ブロードキャスト・オプションが実装されている場合、受信ブロードキャスト・コマンド用に追加のメモリ・ブロックが要求されます。
拡張サブアドレス
ターミナルが持つサブアドレスの数は、60(送信30、受信30)に制限されます。したがって、ターミナルが利用できるユニークなデータ・ワードの数は、1920(60 x 32)です。 送信されるデータがアナログのセンサー・データとスイッチ設定だった初期のアプリケーションにとって、これは、十分以上のものでした。 しかし、今日のアプリケーションの一部に、データを交換するデジタル・コンピュータ、またはデジタル化ビデオ・データをパスするビデオ・センサーでは、ワード数は限定されています。
ほとんどのターミナル設計は、1553インターフェイス回路で使用するために、メモリのブロックを確立しています。このブロックは、アドレス開始ポインタを含みます。 その時、メモリは、特定のメモリ・アドレスに到着するために、サブアドレス番号とワード・カウントによりオフセットされます。
サブアドレスの範囲を拡張する方法は、成功裏に使用されています。この方法は、専用のサブアドレスとデータ・ワードを使用するか、またはデータ・ワード・モード・コードとの同期を使用します。 これらの何れかと関連したデータ・ワードは、メモリ・ブロックの開始アドレスを再確立するために使用されるアドレス・ポインタを含んでいます。 ブロックの変更は、バス・コントローラによって制御され、数多くの機能に基づき行うことができます。 例えば、あるブロックは起動メッセージ用、別ブロックは離着陸用、別ブロックは航法、および巡航用、別ブロックはミッション機能(例えば、攻撃、または回避モード)、そして別ブロックは整備機能用に使用される動作モードです。
開始アドレスの変更は、マイナー・フレーム周期とも関連付けることができます。8マイナー・フレームは、各フレームに対して独立したメモリ・ブロックを持つことができます。 バス・コントローラは、新しい各マイナー・フレームの始めにフレームを同期し、メモリ・ポインタを変更することができます。
大量のデータを交換するコンピュータ(例えば、GPS Almanac Tables)、または起動時にデータ・バスを通してプログラムのロードを受けるコンピュータは、メッセージ・ブロックの開始時にポインタをセットすることができます。 32ワード・メッセージを送り、データを受信したリモート・ターミナルのメモリにおける最終位置にメモリのポインタを動かした後、32ワード・メッセージの次のブロックを送ります。メモリがロードされるまで、このサイクルを継続します。
メジャー/マイナー・フレーム・タイミング
規格は、ワード(コマンド、データ、およびステータス)とメッセージ(情報フォーマット、およびブロードキャスト・フォーマット)の構成を明示します。 これは、一連の管理メッセージ(モード・コード)を提供しますが、システム内でこれをいかに適用するかについて、いかなるガイダンスも提供していません。
リモート・ターミナルは、そのデータの内容に基づき、一般的に、データが収集される頻度と出力されるべき最速の速度を述べています。 入力データに対して、ターミナルは、しばしば、そのジョブを実行したり、一定レベルの精度を維持するために、特定データがどの程度必要とされるかを述べています。 速度は、送信、および更新速度と呼ばれます。システムの全てのデータの需要を調べ、データがいつ、どこからどこへ転送されるかを決定することは、あなたの仕事です。 このデータは、定期メッセージ(ある固定速度で転送されなければならないもの)と非定期メッセージ(一般的に、オペレータがボタンを押す等のイベント・ドリブンであるか、値が範囲に一致する等のデータ・ドリブンであるもの)に細分化されます。
メジャー・フレームは、全ての定期メッセージが最も遅い転送速度で、メッセージの定義により少なくとも1回転送されるように定義されます。 今日のアプリケーションで使用される一般的ななメジャー・フレーム速度は、40~640msまで変わります。1~5秒の範囲でメジャー・フレームを持ついくつかのシステムがありますが、これらは例外です。 マイナー・フレームは、より高いメッセージ更新レートの要求を満たすように設定されます。 マイナー・フレーム・レートは、通常、メジャー・フレームのバイナリー拡張に基づきます。図9は、メジャー/マイナー・フレーム関係の例です。
バス・コントローラ内において、マイナー・フレーム・レートは、バス・コントローラ・ソフトウェアにリアルタイム・クロック割込みを提供するようにセットされます。 新しい各マイナー・フレームの開始時に、割込みが発生し、バス・コントローラは、該当フレームに対するメッセージの発行を開始します。
マイナー・フレーム内のメッセージのシーケンスは、未定義のままです。図9は、これを行う方法の2つの例を示しています。 最初の例において、バス・コントローラは、バックアップ・コントローラとこれを要求するリモート・ターミナルへの同期コマンドでフレームを開始します。 フレーム同期には、該当マイナー・フレームで転送される定期メッセージの全ての送信が続きます。 定期メッセージの終わりに、バス・コントローラは、次のフレームの始まりまでに終了する(デッド・バス・タイム(無送信)をもたらす)か、あるいは、バス・コントローラが非周期メッセージ、エラー処理メッセージを転送するか、 またはバックアップ・バス・コントローラ.にデータを転送するために、この時間を使用することができます。
2番目の例(中央処理アーキテクチャで一般的に使用される)では、バス・コントローラは、全ての定期、および非周期送信メッセージを発行し(データを収集し)、このデータを処理し(恐らく、この処理中にデッドタイムを持つ)、 受信メッセージ全てを発行します(処理の結果を出力する)。
3つ目の例は、与えられたタスクを実行する必要がある時のみ、バス・コントローラが特定のリモート・ターミナルと通信するシステムです。 定期的メッセージ・トラフィックがないので、マイナー、またはメジャー・フレームは存在しません。1553トラフィックの全ては、ある非周期の刺激の結果、恐らく、あるオペレータの入力の結果でしょう。 これは、ホスト・プロセッサ・ソフトウェアがバス上で処理されるべき次のメッセージを決定するため、最も単純な例です。
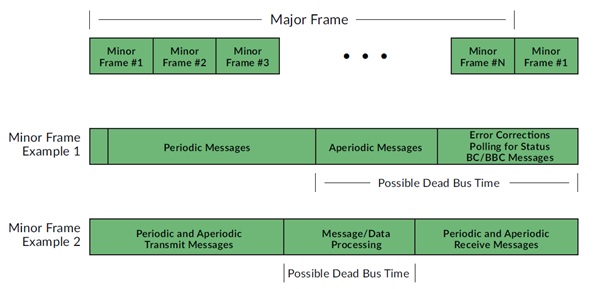
図9 メジャー/マイナー周期
| コマンド・ワード | 20μSec |
| ステータス・ワード | 20μSec |
| データ・ワード | 20μSec(各) |
| メッセージ間ギャップ | 最小2μSec |
| 応答時間 | 最大10μSec |
したがって、50μsのメッセージ間ギャップでバス・コントローラが発行する28ワード受信コマンドに対する時間の総量は、658μsです。これは5msフレーム内の唯一のメッセージである場合、負荷は13%となります。
負荷計算時、表6で与えられた値から変わることがあるため、実際の応答時間と実際のメッセージ間ギャップ時間を使用してください。
バス負荷とメジャー・フレームを通したメッセージの配布の量は、データ・スループットに大きな影響を与えます。実データの最大スループットは、コマンド、およびステータス・ワードのオーバーヘッドと応答、 およびメッセージ間ギャップ時間を計算に入れ、メッセージ毎に32データ・ワードと仮定すると、約46,000ワード/秒です。短いメッセージは、コマンド、およびステータス・ワードのオーバーヘッド、および各種ギャップのため、より少ないデータ・ワードしか転送できません。
ほとんどの購入仕様書は、今日、100%成長が多重システム用に要求され、いかなるマイナー・フレーム負荷も70%を超えないことを宣言しています。100%成長は、メジャー・フレーム負荷が50%を超えられないことを意味します。 MIL-HDBK-1553Aは、負荷の目標値がシステム設計時で40%、配備時で60%で使用することを推奨しています。余分の時間は、システムの成長(多重システムで始める理由の1つは、新しいシステムの追加)とエラー回復メッセージ用に使用されます。
MIL-STD-1553解説文書【日本語技術資料プレゼント】
MIL-STD-1553通信規格の日本語技術資料(計51ページ)をIPROSにて配布しており、ダウンロードいただけます。