
ハードウェア
MIL-STD-1553は、4つのハードウェア要素を定義します。
- 伝送媒体
- リモート・ターミナル
- バス・コントローラ
- バス・モニタ
伝送媒体
伝送媒体、またはデータ・バスは、メイン・バスと多数のスタブから成るツイスト・シールド・ペア伝送線として定義されます。 バスに接続された各ターミナルに1つのスタブが存在します。メイン・データ・バスは、ケーブルの特性インピーダンス(±2%)に等しい抵抗で両端を終端します。 この終端は、データ・バスを電気的に無限伝送線路のように振舞わせます。
| ケーブル・タイプ | ツイスト・シールド・ペア |
| 静電容量 | 最大 30.0 pF/ft、wire to wire |
| 固有インピーダンス | 70.0~85.0 Ω、1 MHz |
| ケーブル減衰 | 最大 1.5 dB/100 ft.、1MHz |
| ケーブル・ツイスト | 最小 4 Twists / ft. |
| シールド・カバー | 最小 90%(Notice2) |
| ケーブル終端 | ケーブル・インピーダンス(±2%) |
| 直結スタブ長 | 最大 1 ft |
| XFMR変圧器スタブ長 | 最大 20 ft |
規格は、ターミナルがメイン・バスに接続される2つの方法を示します。
- 直接結合
- 変圧器結合
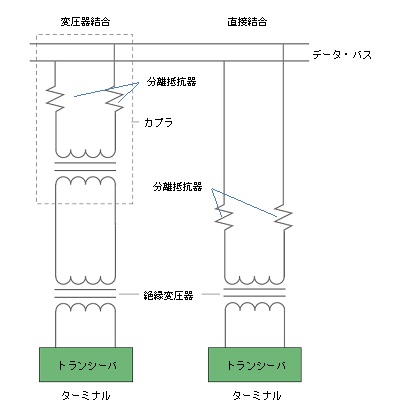
図2 直接結合と変圧器結合
図2に、2つの方法を示します。2つの主な違いは、変圧器結合方式がメイン・バス・ケーブルにスタブ・ケーブルを接続するのに、
絶縁変圧器を使用することです。両方の方法において、2つの分離抵抗器は、バスと直列に配置されています。直接結合方式において、
抵抗器は一般的にターミナル内に配置するのに対し、変圧器結合方式では、抵抗器は一般的にデータ・バス・カプラーと呼ばれるボックスに、結合変圧器と共に配置されます。
2つの結合方法のもう1つの違いは、スタブ長です。直接結合方式の場合、スタブ長は最大1フィートに制限されます。 変圧器結合方式の場合、スタブは、最大20フィート長まですることができます。したがって、直接結合システムでは、 データ・バスは、ターミナルの各々に近接して配線する必要があり、変圧器結合システムに対しては、データ・バスは、各ターミナルから20フィートまで離しても構いません。
直接結合スタブを使用するバスは、スタブの配置により生じるインピーダンス・ミスマッチに耐えるように設計されなければなりません。 したがって、スタブがどこに配置されるかを決定するために、注意深いトレードオフ分析を行う必要があります。 波形の歪が受信に問題を引き起こすかどうかを決定するために、直接結合方法を使用して、設計を構築、および試験すべきです。
マルチスタブ・カプラ
過去においては、接続された各ブラック・ボックスに対して、データ・バス上に1スタブのデータ・バス・カプラー(変圧器結合)を使用するのが普通でした。 近年では、マルチスタブ・カプラが導入され、受け入れられています。マルチスタブ・カプラの使用は、調達する個別の部品数を減少させ、航空機の配線を減らすことができます。 今日のいくつかのアプリケーションにおいて、1つのマルチスタブ・カプラは、各機器ベイ、またはラックに供給されます。追加の「スペア」スタブは、 トラブルシューティング、およびメンテナンス用のモニタと試験機器の接続用の各カプラに供給することができます。
リモート・ターミナル
リモート・ターミナルは、規格内で「バス・コントローラ、またはバス・モニタとして動作しない全てのターミナル」として定義されます。 そのため、コントローラ、モニタ、またはメイン・バス、またはスタブでなければ、リモート・ターミナルでなければなりません。 リモート・ターミナルは、データ・バスとサブシステム間でデータを転送するのに必要な機器を含みます。 では、サブシステムとは何か?1553アプリケーションの場合、サブシステムは、転送されるデータの送信者、またはユーザーです。
初期の1553において、リモート・ターミナルは、主にアナログ、およびディスクリート・データをデータ・バスと互換性のあるデータ・フォーマットに変換するために使用されました。 サブシステムは、まだデータを提供するセンサーとデータを使用するコンピュータでした。より多くのデジタル・アビオニクスが利用可能になったので、 センサー、およびコンピュータにリモート・ターミナルを組込むのが傾向となっています。今日、サブシステムは、組込リモート・ターミナルを含むのが一般的です。 図3は、異なるレベルのリモート・ターミナルを示しています。
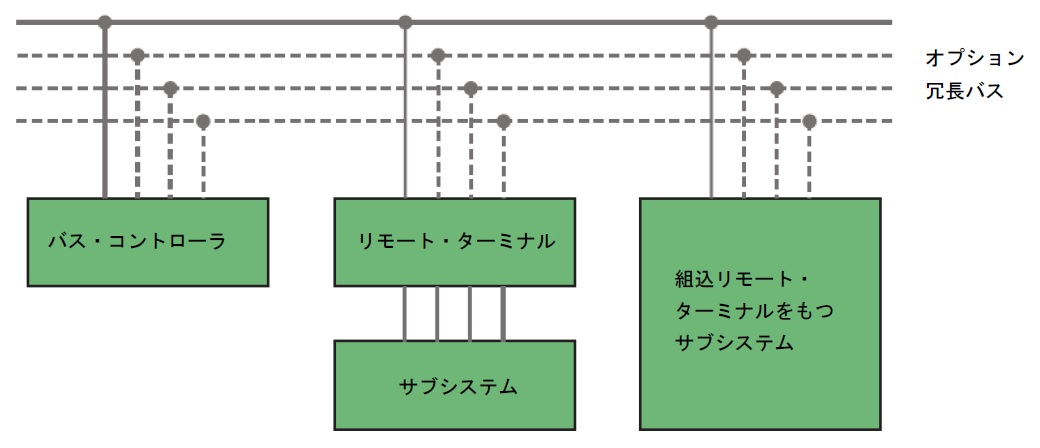
図3 単純な多重アーキテクチャ
リモート・ターミナルは、一般的にトランシーバ、エンコーダ/デコーダ、プロトコル・コントローラ、バッファ、またはメモリ、およびサブシステム・インターフェイスで構成されています。 コンピュータ、またはプロセッサを含む現代のブラック・ボックスにおいて、サブシステム・インターフェイスは、コンピュータのアドレス、データ、制御バスへのインターフェイスに必要なバッファとロジックで構成することができます。 今日のアプリケーションにおいて最も普及している二重冗長システムに対しては、2つのトランシーバと2つのエンコーダ/デコーダが必要とされます。
図4は、リモート・ターミナルとサブシステムとの接続を示すブロック図です。リモート・ターミナルが共通メモリ(プライベートに対して)を共有する場合、 リモート・ターミナルが扱えるメモリの一部がリモート・ターミナルの一部とみなされるべきことを示すべきです(図4参照)。 リモート・ターミナルは、データ・バス、およびユーザー、または発信元との間でデータを転送するために必要な全ての電子機器で構成されています。
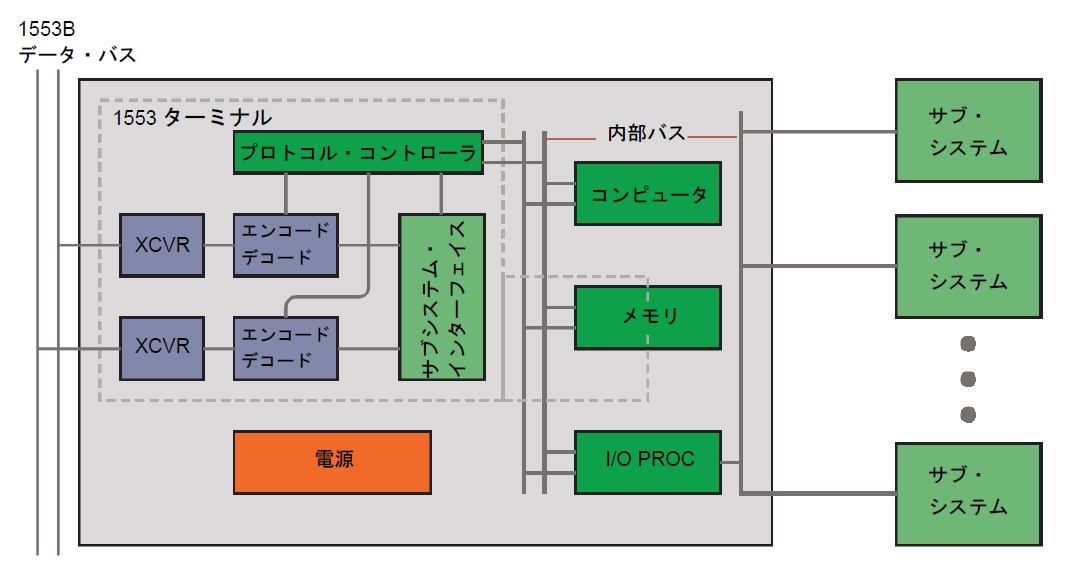
図4 ターミナル定義
しかし、リモート・ターミナルは、単にデータ・フォーマッター以上のものでなければなりません。 これは、バス・コントローラからのコマンドを受信、デコードし、それに応じて応答することができなければなりません。 これはまた、データの価値があるメッセージをバッファし、送信エラーを検出し、データに対する検証テストを実行し、メッセージ送信のステータスを報告できなければなりません。 規格のNotice2は、リモート・ターミナルがいくつかのバス管理コマンド(モード・コマンドと呼ばれる)を実行できることも要求しています。 二重冗長アプリケーションの場合、これは、同時に両バス上のコマンドを監視し、デコードすることができなければなりません。
リモート・ターミナルは、規格により定義されたプロトコルに従わなければなりません。 バス・コントローラから受信したコマンドに応答することのみできます(言い換えれば、話しかけられた時のみ話す)。 有効なコマンドを受信した時、非常に小さな、厳密に定義された時間内に応答しなければなりません。 メッセージが定義された有効性の要求を満たしていない場合、リモート・ターミナルは、メッセージを無効にし、データを廃棄しなければなりません (サブシステムにより使用されることを許可しない)。バス・コントローラにステータスを報告することに加え、今日のほとんどのリモート・ターミナルは、 サブシステムにいくつかのレベルのステータス情報を提供することができます。
バス・コントローラ
バス・コントローラは、データ・バス上のデータの流れの指示を担当します。複数のターミナルがバス・コントローラとなることができますが、 1つのバス・コントローラのみが、一度にアクティブとなれます。バス・コントローラは、データ・バス上にコマンドを発行することが許された唯一のものです。 コマンドは、データの転送、またはバスの制御、および管理(モード・コマンドと呼ばれる)のためにあります。
一般的に、バス・コントローラは、ミッション・コンピュータ、ディスプレイ・プロセッサ、または火器管制コンピュータのような他のいくつかのコンピュータ内に含まれている機能です。 バス・コントローラと関連した電子機器の複雑さは、サブシステム・インターフェイス(コンピュータへのインターフェイス)の機能、実行されるべきエラー管理と処理の総量、およびバス・コントローラのアーキテクチャです。
3つの型のバス・コントローラ・アーキテクチャーが存在します。
- ワード・コントローラ
- メッセージ・コントローラ
- フレーム・コントローラ
ワード・コントローラ
ワード・コントローラは、最も古く、最も単純な型のコントローラです。今日、ワード・コントローラはほとんど作られていません。 ワード・コントローラに対して、ターミナル電子機器は、一度に1ワードをサブシステムに送信します。メッセージのバッファリングと検証は、サブシステムにより実行されます。 これは、バスのタイミング要求のため、サブシステムにかなりの負荷がかかります。
メッセージ・コントローラ
今日、「配備」されたバス・コントローラの多くは、メッセージ・コントローラです。これらのコントローラは、メッセージの終了時、または恐らくはエラー発生時にのみコンピュータと接続し、 一度に単一のメッセージを出力します。いくつかのメッセージ・コントローラは、コンピュータに割り込む前に、代替データ・バス上で一度送信するように、マイナーなエラー処理を実行することができます。
コンピュータは、メッセージがメモリ内に存在し、コントロール・ワードを提供するインターフェイス電子機器に通知します。 各メッセージに対して、コントロール・ワードは、一般的に、どのバスがメッセージを転送すべきか、どこでメモリのデータを読み書きすべきか、エラーが発生した場合、 何をすべきかについて、メッセージ型(例えば、RT-BC、またはRT-RTコマンド)を電子機器に通知します。コントロール・ワードは、電子機器のハードウェア設計の機能であり、バス・コントローラ中で標準化されていません。
フレーム・コントローラ
フレーム・コントローラは、バス・コントローラにおける最新の概念です。マイクロプロセッサとApplication Specific Integrated Circuits(ASIC)の出現により、 このタイプのコントローラは、急速に標準となりつつあります。フレーム・コントローラは、ホスト・コンピュータにより定義されたシーケンス内の多重メッセージを処理することができます。 フレーム・コントローラは、一般的に、メッセージ制御ワードによる定義により、いくつかのエラー処理を実行することができます。フレーム・プロセッサーは、一連のメッセージの終了時、 または処理できないエラーが検出された時のみ割り込み、可能な限りサブシステム、またはホスト・コンピュータを「オフロード」するために使用されます。
バス・モニタ
バス・モニタは、データ・バス上の情報交換を聴取(監視)するターミナルです。規格は、「オフライン・アプリケーション(例えば、飛行試験記録、整備記録、または任務分析)用、 またはバス・コントローラとして引き継ぐべきバックアップ・バス・コントローラに十分な情報を提供するために」使用されるバス・モニタにより獲得される情報を宣言して、 バス・コントローラがいかに使用されるのかを厳密に定義します。モニタは、バスからの全データを収集するか、または選択されたデータを収集します。 その使用を制限する理由は、モニタがデータ収集している間、モニタがステータス・ワードを送信しないため、送信された情報のステータスを報告できない受動デバイスであるという点で、 規格のコマンド応答プロトコルから逸脱していることにあります。バス・モニタは、2つのカテゴリに分類されます。
- 試験用のレコーダ
- バックアップのバス・コントローラとして機能するターミナル
データの収集において、モニタは、リモート・ターミナルと同じメッセージ検証機能を実行し、エラーが検出された場合、サブシステムにエラーを通知します (サブシステムは、データを記録できるが、エラーが記録されるべき)。試験用レコーダとして機能するモニタの場合、サブシステムは、一般的に磁気テープ、またはディスクのような記録デバイス、 またはテレメトリー・トランスミッタです。バックアップのバス・コントローラとして機能するモニタの場合、サブシステムはコンピュータです。 今日では、バス・モニタがリモート・ターミナルを含むことは一般的です。モニタは、そのターミナル・アドレス宛のコマンドを受信した時、リモート・ターミナルとして応答します。 他の全てのコマンドに対しては、モニタとして機能します。リモート・ターミナル部分は、ステータスと残されたメモリ、または時間の総量(例えば、記録テープ)を監視するバス・コントローラにフィードバックを提供するために使用することができます。 リモート・ターミナル部分はまた、どのメッセージをキャプチャすべきかについて、選択モニタを再プログラムするためにも使用することができます。
ターミナル・ハードウェア
リモート・ターミナル、バス・コントローラ、およびバス・モニタ間の電子ハードウェアは、あまり違いはありません。 リモート・ターミナルとバス・コントローラ(リモート・ターミナルでもある場合、バス・モニタも)はどちらも、データをフォーマットし、転送するために、 トランシーバ/レシーバ、およびエンコーダ/デコーダを持っている必要があります。トランシーバとエンコーダ/デコーダに対する要求は、ハードウェア要素間で変わりません。 表3と表4に、ターミナルの電気特性を示します。
3要素全ては、数レベルのサブシステム・インターフェイスとデータ・バッファリングを持ちます。主な違いは、プロトコル制御ロジックにあり、多くの場合、マイクロコード命令がわずかに異なっています。 この理由のため、3つのすべてのデバイスとして機能することができる1553ハードウェア回路を見つけるのが一般的です。
ターミナルを設計するのに利用できる「既製品」コンポーネントが豊富に存在します。これらは、ディスクリート・トランシーバ、エンコーダ/デコーダ、およびプロトコル・ロジック・デバイスから、 変圧器を除く全てのものを含む単一の二重冗長ハイブリッドまで様々です。
| 要求 | 変圧器結合 | 直接結合 | 条件 |
| 入力レベル | 0.86~14.0 V | 1.2~20.0 V | p-p、l-l |
| 応答なし | 0.0~0.2 V | 0.0~0.28 V | p-p、l-l |
| ゼロ・クロス安定性 | ±150.0 nSec | ±150.0 nSec | |
| 上り/下り時間 | 0 nSec - Sine | 0 nSec - Sine | |
| ノイズ除去 | 140.0 mV WGN | 200.0 mV WGN | BER 1 per 107 |
| 一般モード除去 | ±10.0 V peak | ±10.0 V peak | |
| 入力インピーダンス | 1000 Ω | 2000 Ω | 75 kHz~1 MHz |
| 要求 | 変圧器結合 | 直接結合 | 条件 |
| 出力レベル | 18.0~27.0 V | 6.0~9.0 V | p-p、l-l |
| ゼロ・クロス安定性 | 25.0 nSec | 25.0 nSec | |
| 上り/下り時間 | 100~300 nSec | 100~300 nSec | 10%~90% |
| 最大歪 | ±900.0 mV | ±300.0 mV | peak、l-l |
| 最大出力ノイズ | 14.0 mV | 5.0 mV rms | ms、l-l |
| 最大誤差電圧 | ±250.0 mV | ±90.0 mV | peak、l-l |
MIL-STD-1553解説文書【日本語技術資料プレゼント】
MIL-STD-1553通信規格の日本語技術資料(計51ページ)をIPROSにて配布しており、ダウンロードいただけます。