
物理層
CANは120Ωツイストペア・ケーブルを介して相互接続されたノードで構成されています。これらのノードは媒体を共有し、CANプロトコルを使用して通信します。 通常、双方向通信を利用するマルチマスタ・ネットワークです。 図2-1に示すように異なるサプライヤ、異なるシステム間で相互運用性に必要なパフォーマンスを確保するためには、 すべてのノードがCAN ISO 11898 パート1およびパート2仕様に準拠している必要があります。
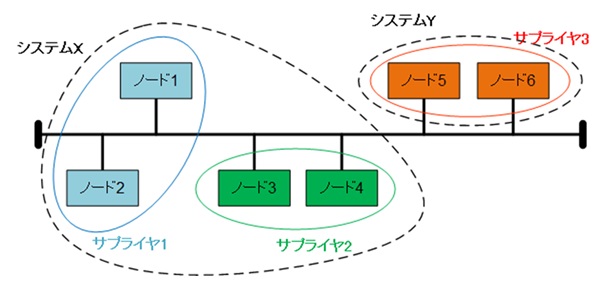
図2-1 マルチシステム・ネットワーク
CAN物理層標準
ノードの特性
CAN物理層は、信号が媒体上でどのように伝送されるかを定義します。信号はISO 11898-2で次のように扱われます:
- ビット表現と同期
- 送受信信号の電気信号レベルと特性
- 伝送媒体およびコネクタ
図2-2は、CANノードの例を示します。CAN機能はさまざまな方法で実装できます。CANコントローラは単独で使用することも、マイクロコントローラに組込むこともできます。 特定用途向け集積回路(ASIC)はまた、すべての機能を含むことができます。これらのコントローラの多くは市販されています。
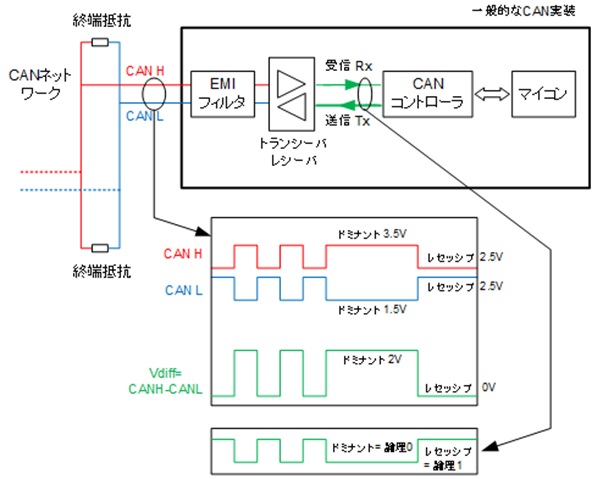
図2-2 ノード・アーキテクチャ例
電磁的な保護要件
各ノードには、設計の環境要件に適合する電磁的保護(例:落雷の間接的影響、サージ、HIRF:High Intensity Radiated Fields)のための回路が必要となりますが、電磁的保護を行うと静電容量が増加します。
- コモンモードの内部容量C1とC2の合計は100pFを超えてはいけない
- 差動容量で測定した差動容量CDIFFは50pFを超えてはいけない
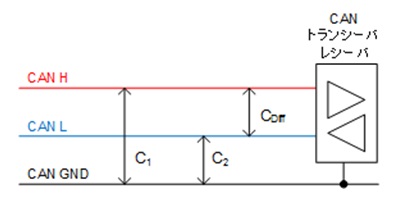
図2-3 差動容量
バス電圧
CAN コントローラは2 本のワイヤの電位差によりそのバスのレベルを判断します。バスのレベルにはドミナント・レベルとレセッシブ・レベルがあり、必ずどちらか一方のレベルをとります。 送信ノードはこのバスのレベルを変化させることによって、受信ノードにメッセージを送信することができます。図2-4にCANのバス電圧レベルを示します。
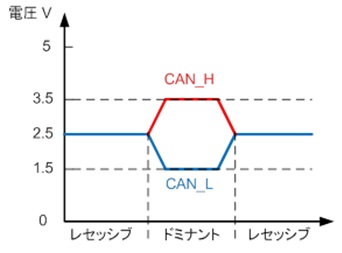
図2-4 バス電圧レベル
CANバス速度 VS. バス長
ARINC 825では、以下の伝送速度の一つを使用します:
- 83.333 kbit/s
- 125 kbit/s
- 250 kbit/s
- 500 kbit/s
- 1 Mbps
CANの電気的特性に関して、データレートは図2-5に示すようにネットワークの長さの関数です。より短いバス長の場合、1Mbit/sの最大データレートを使用することができます。 ±2.5V差動伝送は、高コモンモード除去と高い電磁妨害(EMI)を保証します。CANネットワーク・セグメントに接続できるノードの数は、CANバス・トランシーバが駆動できる最小限の負荷抵抗に依存します。
ノイズの多い環境ではデータレートが高いと機能しないバスが発生する場合があるため、データレートはできるだけ低く選択する必要がありますが、最悪の場合の安全マージンを含んだ状態で十分に高くする必要があります。 また、伝送ビットレートの許容誤差は、選択されたデータレートの±0.15%でなければなりません。
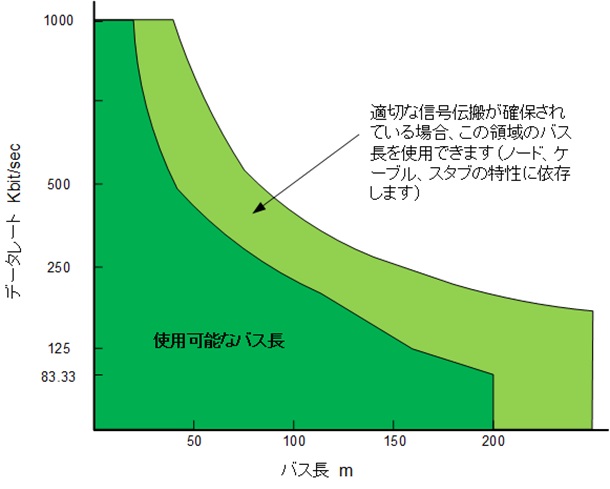
図2-5 バス長とデータレートの関係
ビット・タイミング
ビット・タイミング・パラメータは、CANコントローラ・コンフィグレーション・レジスタに設定されます。 これは、すべてのノード間の相互運用性を保証し、回線およびノードの遅延、処理時間および発振器の許容誤差を保証するために定義されています。
同期ジャンプ幅(SJW :Synchronization Jump Width)は、1時間量[Tq]とする。サンリング・ポイントは、CANシステムのビット・タイミングの75%~87.5%まで選択する必要があります。 1つのサンリング・ポイントのみが使用されます。ISO 11898-1は、SJW、時間量、サンリング・ポイントの定義を提供しています。
適切な調停のために、ネットワークに接続されたすべてのノードは、同じビット・タイミング構成を持つ必要があります。1つのノードでも範囲外である時、全体的な機能は保証されません。
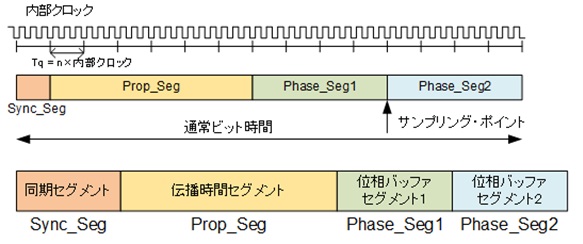
図2-6 ビット・タイミング
以下はISO規格からの定義です:
- Sync_Seg
- 同期セグメント。これはさまざまなCANノードの同期に使用されます。このセグメント内にエッジが存在することが予想されます。
- Prop_Seg
- 伝播時間セグメント。これは、ネットワーク内の物理的遅延時間を補償するために使用されます。
- Phase-Seg (1 / 2)
- 位相バッファ・セグメント。これらは、発振子の発振誤差を次の再同期までに補償するために使用されます。これらのセグメントは、再同期によって延長または、短縮される場合があります。
- Sample point
- サンプリング・ポイント。バスレベルが読み取られて解釈される時点。
さらなる定義は上記から導かれます。
- Sample_Seg
- Sample_Seg = Prop_Seg + Phase_Seg1
- ユーザーは、Prop_SegとPhase_Seg1を区別できません。
- IPT(Information Processing Time)
- 情報処理時間は、ビットレベルの計算のためにサンプリング・ポイントから始まるセグメント時間です。
- SJW = Synchronization Jump Width
- 再同期ジャンプ幅。再同期化の結果、Phase_Seg1は長くなりPhase_Seg2はSJWによって与えられる限界まで短縮される。
- Internal delay time
- CANノードのtnodeは、ノード内部処理によって信号に課せられた遅延です。
- Line propagation delay
- tbus-lineは、2つの最も遠いノード 間の配線の電気的特性および長さによって引き起こされる遅延です。適切な調整のために、以下の条件が満たされなければなりません:
- Prop_Seg ≧ 2×tnode + 2×tbus-line
| セグメント | 期間(ISO仕様) |
| 同期セグメント | 1 Tq |
| 伝播時間セグメント | 1~8 Tq |
| 位相バッファセグメント 1 | 1~8 Tq |
| 位相バッファセグメント 2 | 最大(IPT、位相バッファセグメント1) |
| SJW | 1~4 Tq および < 位相セグメント |
| ビット レート (kbit/s) |
TBIT (μs) |
Tq(ns) | Tq/ bit数 |
Prop_Seg + Phase_Seg1 (Tq) |
Phase_ Seg2 (Tq) |
SJW (Tq) |
MAXIPT (ns) |
発振器精度 |
| 83.333 | 12 | 750 | 16 | 11 | 4 | 1 | 1500 | 100 ppm |
| 125 | 8 | 500 | 16 | 11 | 4 | 1 | 1000 | 100 ppm |
| 250 | 4 | 250 | 16 | 11 | 4 | 1 | 400 | 100 ppm |
| 500 | 2 | 125 | 16 | 11 | 4 | 1 | 200 | 100 ppm |
| 1000 | 1 | 125 | 8 | 5 | 2 | 1 | 150 | 100 ppm |
設計の考慮事項
CAN物理層の干渉に対する高い耐性はCAN_Hおよび、CAN_Lの対称性によって保障されています。トランシーバは、高い耐性を保証する主要な要素で、さらに内部機器レイアウト(ルーティング)も重要です。 トランシーバへの配線(PCB上の配線)をできるだけ平行に保つように設計する必要があります。コネクタピンは図2-7、図2-8に示すように相互に近接していて干渉信号と環境から分離していなければなりません。
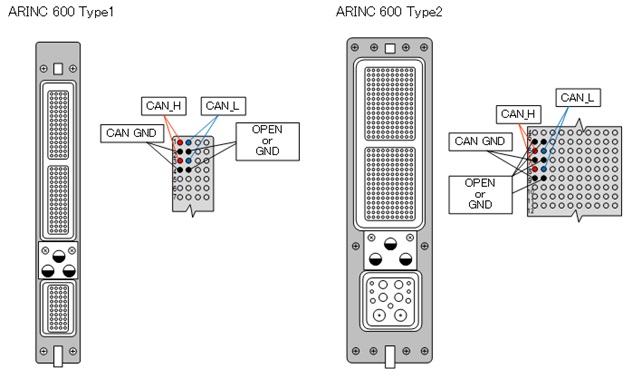
図2-7 ARINC 600コネクタ・ピンアサイン例
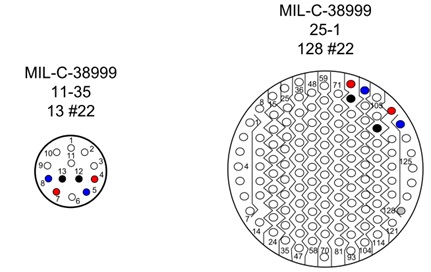
図2-8 丸型コネクタ・ピンアサイン例
航空機へのCANの設置は簡単で堅牢で、他のネットワークとは区別されます。ディジチェーン接続やバンドル・スプライスなどのさまざまなバス相互接続方法が可能です(図2-9)。 CANはシールド付きまたは、シールドなしのケーブル、および手ごろな価格のD-Subタイプを含む様々なコネクタで使用できます。
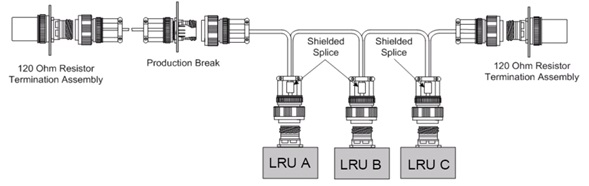
図2-9 接続方法
ケーブル特性
ケーブル特性は、ISO 11989-2(インピーダンス、長さに関連する抵抗、ライン遅延)に従う必要があります。 ケーブルは、設置環境、すなわち加圧または、非加圧の使用環境に応じて選択します。最低限、シールド・ツイストペアを使用する必要があります。
コネクタ/コンタクト特性
CANに特別なタイプのコネクタやコンタクトは必要ありません。2つの信号(CAN_HとCAN_L)のための少なくとも2ピンのコネクタが必要です。 診断プラグを配線に追加して、下図2-10の標準のD-Sub9コネクタを使用してCANのトラブルシューティングと保守を容易にすることができます。
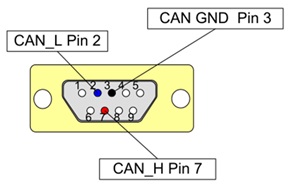
図2-10 D-Sub9コネクタ
設置
CANワイヤのシールドは、シャーシ・グランドに接続する必要があります。
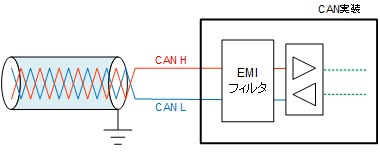
図2-11 グランド接続
ARINC 825の設置は、図2-12に示すようなリニア・トポロジを利用します。スター・トポロジーは望ましくない反射波をもたらす可能性があるため推奨されていません。
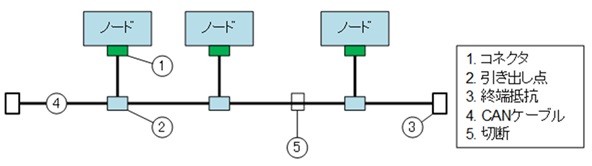
図2-12 リニア・トポロジ
インピーダンス調整と反射波を避けるために、120Ωの終端抵抗をネットワークの両端に取り付ける必要があります。終端抵抗の公差はISO 11898-2(±10%)に記載されています。